-
1 port capacity
1) Морской термин: грузооборот порта2) Военный термин: пропускная способность порта3) Вычислительная техника: количество портов, число поддерживаемых портов, портовая ёмкость (пропускная способность порта сети, например, при ADSL-соединении)4) Логистика: портовая мощность -
2 port capacity
число поддерживаемых портов; количество портов -
3 voice server
голосовой сервер
Автоматическое устройство с теми же функциями, что и у оператора-человека. Голосовые серверы подключены к платформе речевых приложений или к телефонной сети. Как правило, голосовые серверы могут обрабатывать большое количество портов. Голосовые серверы накапливают и/или извлекают голосовые послания и голосовые сообщения. В голосовых серверах могут также использоваться другие технологии обработки речи, такие как распознавание, понимание и синтез речи, а также общие технологии обработки сигналов, такие как обработка шумов, уменьшение эха, двухтональная многочастотная обработка (DTMF) (МСЭ-Т P.10/ G.100).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > voice server
-
4 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
5 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
6 power management
контроль потребления электроэнергии
контроль энергопотребления
—
[Интент]Тематики
Синонимы
EN
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > power management
7 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
8 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
9 generic object oriented substation event
- широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.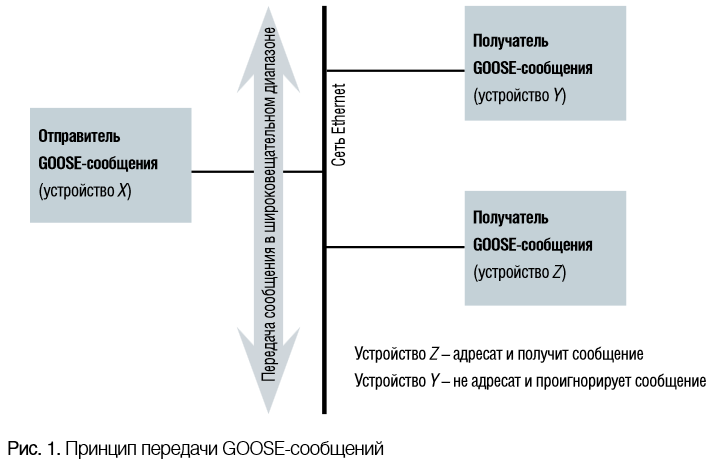
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.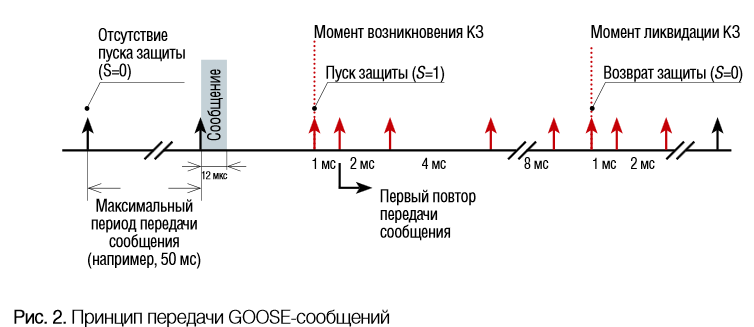
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).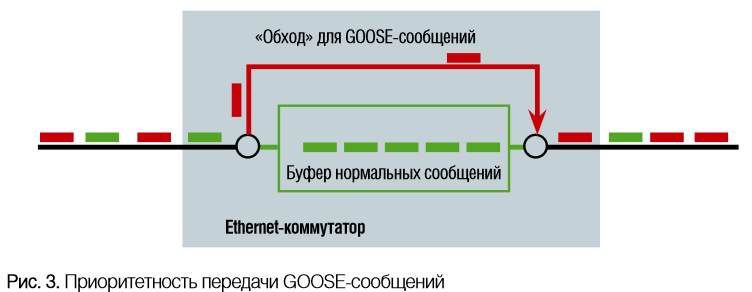
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
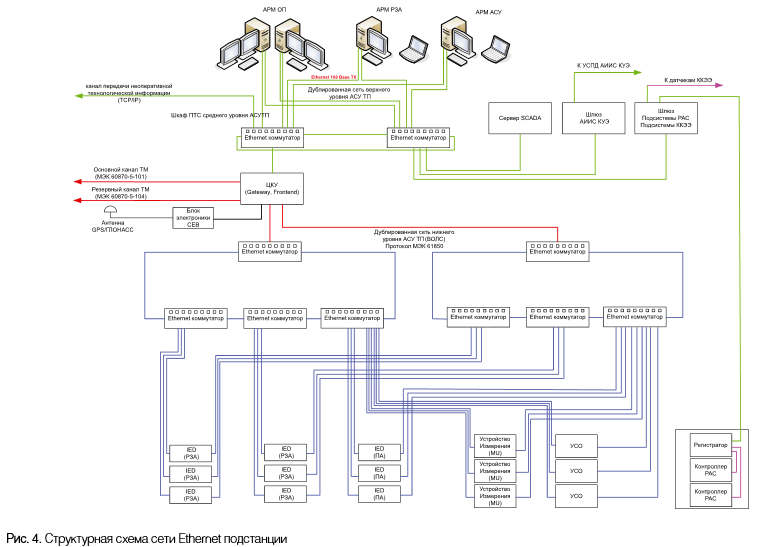
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).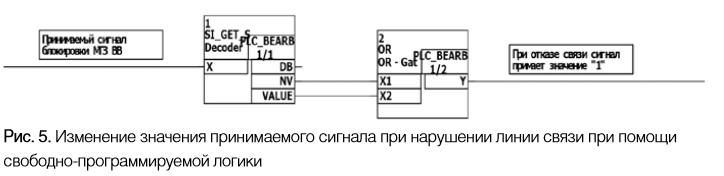
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > generic object oriented substation event
10 GOOSE
- широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > GOOSE
11 voyage charter, trip charter
. 1) фрахтование судна на один рейс, т.е. соглашение, по которому судовладелец за определенную плату (фрахт) обязуется перевести обусловленный груз из одного или нескольких портов отправления в один или несколько портов назначения; 2) фрахтование на последовательные рейсы; применяется при перевозках больших количеств однородного груза в одном и том же направлении одним и тем же судном; 3) фрахтование по генеральному контракту, т.е. соглашение, по которому судовладелец обязуется в течение определенного периода времени перевезти обусловленное количество груза. . Словарь экономических терминов 1 .Англо-русский экономический словарь > voyage charter, trip charter
12 repeater
- трансляция (радио)
- репитер
- реле всякого рода
- промежуточный усилитель
- повторитель (в локальной вычислительной сети)
- повторитель
- обводной аппарат
- выносной индикатор
выносной индикатор
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
обводной аппарат
Валковая арматура для передачи прокатыв. полосы из одной клети линейного прокатного стана в другую, а также для прокатки в обратном направлении.
[ http://metaltrade.ru/abc/a.htm]Тематики
EN
повторитель
Устройство, которое передает электрические сигналы из одного кабеля в другой без маршрутизации или фильтрации пакетов, обеспечивая лишь регенерацию сигналов. Задачей повторителя является увеличение протяженности сети (коллизионного домена). В терминах OSI повторитель представляет собой промежуточное устройство физического уровня. См. также bridge и router.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
ретранслятор
повторитель
Устройство для усиления сигнала с целью последующего переизлучения.
[ http://www.morepc.ru/dict/]Повторитель (англ. Repeater) -
устройство, обеспечивающее сохранение формы и амплитуды сигнала при передаче его на большее, чем предусмотрено данным типом физической передающей среды, расстояние; используется для увеличения протяженности сети.
В локальных сетях любого класса предусмотрены жесткие ограничения на длину участка сети между двумя точками подключения. Данные ограничения связаны, прежде всего, с коэффициентом затухания сигнала в линии передачи данных, который не должен превышать определенного порогового значения: в противном случае уверенный прием информации станет невозможен. Больше всего в этом случае выигрывают сети, построенные с применением линий из оптического волокна. Поскольку коэффициент затухания в этой среде очень мал, оптоволоконный кабель можно прокладывать на значительные расстояния без потери качества связи.
Вместе с тем, оптоволоконные линии связи достаточно дороги. Как быть, если на каком-либо предприятии эксплуатируется стандартная локальная сеть с пропускной способностью в 10 Мбит/с, отдельные участки которой, например, сеть бухгалтерии и склада, находятся на значительном удалении друг от друга, а перед руководством фирмы возникла необходимость объединить их между собой? Именно в этом случае и могут использоваться репитеры.
Репитеры оснащены, как правило, двумя сетевыми портами с одним из стандартных интерфейсов (двумя портами AUI, портами Thinnet и AUI, портами SC и AUI). Присоединяются они непосредственно к локальной сети на максимально возможном расстоянии от ближайшей точки подключения (для сетей класса 10BaseT оно составляет 100 м). Получив сигнал с одного из своих портов, репитер формирует его заново с целью исключить любые потери и искажения, произошедшие в процессе передачи, после чего ретранслирует результирующий сигнал на остальные порты. Таким образом, при прохождении сигнала через репитер происходит его усиление и очистка от посторонних помех.
В некоторых случаях повторитель выполняет также функцию разделения ретранслируемых сигналов: если на одном из портов постоянно фиксируется поступление данных с ошибками, это означает, что в сегменте сети, подключенном через данный порт, произошла авария, и репитер перестает принимать сигналы с этого порта, чтобы не передавать ошибки всем остальным сетевым сегментам, т.е. не транслировать из на всю сеть.
Основной недостаток повторителей заключается в том, что в момент прохождения сигналов через это устройство происходит заметная задержка при пересылке данных. Протоколы канального уровня Ethernet, использующие стандарт CSMA/CD, отслеживают сбои в процессе передачи информации, и если коллизия была зафиксирована, передача повторяется через случайный промежуток времени.
В случае, если число репитеров на участке между двумя компьютерами локальной сети превысит некоторое значение, задержки между моментом отправки и моментом прием данных станут настолько велики, что протокол попросту не сможет проконтролировать правильность пересылки данных, и обмен информацией между этими компьютерами станет невозможен. Отсюда возникло правило, которое принято называть "правилом 5-4-3": на пути следования сигнала в сети Ethernet не должно встречаться более 5 сегментов и более 4 репитеров, причем только к 3 из них могут быть подключены конечные устройства.
При этом в целом в локальной сети может присутствовать более 4 повторителей, правило регламентирует только количество репитеров между двумя любыми точками подключения. В некоторых случаях повторители устанавливают парами и объединяют между собой проводом, в этом случае между двумя компьютерами в сети не может присутствовать более двух таких пар.
Конструктивно репитер может быть выполнен либо в виде отдельной конструкции со своим блоком питания, либо в виде платы, вставляемой в слот расширения материнской платы компьютера. Репитер в виде отдельной конструкции стоит дороже, но он может быть использован для соединения сегментов Ethernet, выполненных как на тонком, так и на толстом кабеле, т.к. он имеет и коаксиальные разъемы, и разъемы для подключения трансиверного кабеля. С помощью этого репитера можно даже соединить в единую сеть сегменты, выполненные и на тонком, и на толстом кабеле.
Репитер в виде платы имеет только коаксиальные разъемы и поэтому может соединять только сегменты на тонком коаксиальном кабеле. Однако он стоит дешевле и не требует отдельной розетки для подключения электропитания. Один из недостатков встраиваемого в рабочую станцию репитера заключается в том, что для обеспечения круглосуточной работы сети станция с репитером также должна работать круглосуточно. При выключении питания связь между сегментами сети будет нарушена.
[ http://sharovt.narod.ru/l10.htm]Тематики
Синонимы
EN
промежуточный усилитель
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
реле всякого рода
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
репитер
Пассивное устройство, повторяющее сигналы на CAN шине. Репитер используется для увеличения максимально возможного числа подсоединяемых узлов или для увеличения протяженности сетей (свыше 1 км) или для реализации древовидной либо сложной топологий.
[ http://can-cia.com/fileadmin/cia/pdfs/CANdictionary-v2_ru.pdf]Тематики
EN
трансляция (радио)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
3.7 повторитель (repeater): Устройство, имеющее два порта, предназначенные для соединения с антеннами, которое может принимать, усиливать и передавать одновременно в одном направлении - сигнал в полосе частот радиопередачи базовой станции, а в другом направлении - сигнал в соответствующей полосе частот радиоприема базовой станции.
Источник: ГОСТ Р 52459.8-2009: Совместимость технических средств электромагнитная. Технические средства радиосвязи. Часть 8. Частные требования к базовым станциям системы цифровой сотовой связи GSM оригинал документа
Англо-русский словарь нормативно-технической терминологии > repeater
13 Abstract Service
абстрактная служба (услуга).Набор возможностей, предлагаемых одним объектом (поставщиком абстрактной услуги) другому (пользователю абстрактной услуги) посредством одного или нескольких портов поставщика. Абстрактная услуга может иметь любое количество пользователей и поставщиков.English-Russian dictionary of modern telecommunications > Abstract Service
14 Baltimore
Город на севере штата Мэриленд, в устье р. Патапско [Patapsco River], в 24 км от Чесапикского залива [ Chesapeake Bay] и в 56 км к северо-востоку от г. Вашингтона. 651,1 тыс. жителей (2000), с пригородами [ MSA] - 2,5 млн. человек. Один из крупнейших морских портов страны (ввоз нефти, железной руды, руд цветных металлов, каучука, кофе, сахара, чая, удобрений; вывоз стали, цемента, угля, зерна, машин и оборудования). Международный аэропорт [ Baltimore-Washington International Airport]. Промышленный, торгово-финансовый и культурный центр. Судостроение, металлургия, радиоэлектроника, электротехника, железнодорожное оборудование, авиакосмическое оборудование, химическая и фармацевтическая промышленность, продукты нефтепереработки и др. Город основан в 1729 как порт отгрузки табака, статус города с 1745. Ко времени Американской революции [ American Revolution] стал крупным морским портом и центром судостроения, отсюда велась торговля с европейскими странами и Карибским регионом. В декабре 1776 - марте 1777 здесь проходил Континентальный конгресс [ Continental Congresses]. Во время англо-американской войны 1812-14 [ War of 1812] англичане атаковали Балтимор, но потерпели поражение у форта Макгенри [Fort McHenry]. В первые десятилетия XIX в. город наряду с г. Нью-Йорком служил "воротами" во внутренние районы страны, в его развитии важную роль сыграли такие транспортные артерии, как Национальная дорога [ National Road] и железная дорога "Балтимор - Огайо" [ Baltimore and Ohio Railroad]. К 1850 Балтимор был вторым по численности населения городом США - здесь жили 169 тыс. человек. К началу Гражданской войны [ Civil War] большинство горожан поддерживали Юг [ South], поэтому федеральные войска оккупировали Балтимор уже в 1861. В феврале 1904 большая часть центра города была уничтожена пожаром, но быстро восстановлена; для обновленного Балтимора характерны кирпичные одноквартирные дома [ row house]. Во время первой мировой войны был дан толчок промышленному развитию, в городе появились сталелитейные и нефтеперерабатывающие заводы, в 40-е годы здесь производились военные корабли, самолеты. Численность населения достигла в 1950 цифры 949 тыс. человек, но позднее многие производства закрылись, и количество жителей снизилось за счет миграции в другие регионы. Первоначально значительную часть балтиморцев составляли ирландцы и немцы, ныне (2000) афроамериканцы [ Afro-Americans] составляют 64,3% населения. В северо-западной части города и прилегающих пригородах - крупная еврейская община. Университет Джонса Хопкинса [ Johns Hopkins University] (1876), Балтиморский университет [Baltimore, University of (UB)] (1925), отделение Мэрилендского университета [ Maryland, University of] (1807), несколько колледжей, Консерватория Пибоди [Peabody Conservatory of Music; Peabody Institute] (1868). Стадион, ипподром. Среди достопримечательностей - Национальный памятник "Форт Макгенри" [ Fort McHenry National Monument and Historic Shrine], фрегат "Констеллейшн" [ Constellation, U.S.S.], музеи Г. Л. Менкена [ Mencken, Henry Louis (H. L.)], Э. По [ Poe, Edgar Allan], Базилика Успения [ Basilica of the Assumption], туристический район старого порта Иннер-Харбор [Inner Harbor].15 BIT
- тумба швартовная
- СТРУКТУРА И ФОРМАТ ДАННЫХ
- перка
- передача двоичных данных
- кусочек
- Информационный бит
- двоичная единица информации
- встроенный контроль
- бурав
- бит
- бак для ввода раствора борной кислоты
бак для ввода раствора борной кислоты
(при аварии ядерного реактора)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
бит
Двоичная единица представления данных.
[ ГОСТ 15971-90]
[ ГОСТ Р 50304-92]Тематики
- системы для сопряж. радиоэлектр. средств интерфейсные
- системы обработки информации
EN
бурав
сверло с режущей кромкой на одном конце и круглым отверстием (ушком) для ручки на другом. Используют для ручного сверления отверстий в древесине. Бурава подразделяют на цилиндрические, улиткообразные и ложечные. Цилиндрические бурава изготовляют длиной 500–600 мм для сверления отверстий диаметром 12–38 мм; улиткообразные – длиной 285–356 мм для отверстий 16–22 мм; ложечные – длиной 150–340 мм для отверстий 5—22 мм. Цилиндрические и улиткообразные бурава имеют заборный винт, благодаря которому они легко входят в древесину.
Для сверления отверстий диаметром меньше 10 мм используют буравчик – круглый стальной стержень с режущей кромкой на одном конце; другой конец стержня изогнут и образует ручку.
[Энциклопедия «Техника». — М.: Росмэн. 2006]
Бурава:
а – цилиндрический винтообразный; б – улиткообразный; в – буравчик;
1 – ушко; 2 – рабочая часть; 3 – режущая кромка; 4 – заборный винтТематики
- строит. машины, оборуд., инструмент прочие
EN
двоичная единица информации
бит
Количество информации (или энтропия), равное единице при выборе основания логарифма, равного двум.
Примечание
Применяются иногда и другие единицы количества информации: десятичная (при десятичном логарифме), натуральная (при натуральном логарифме).
[Сборник рекомендуемых терминов. Выпуск 94. Теория передачи информации. Академия наук СССР. Комитет технической терминологии. 1979 г.]Тематики
Синонимы
EN
кусочек
отрезок
частица
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
передача двоичных данных
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
перка
зенковка
режущий инструмент
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
тумба швартовная
Швартовное устройство в форме невысокого столба с грибовидной или крюковидной уширенной головой, которым оборудуется причальное сооружение
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
Синонимы
EN
DE
FR
3. СТРУКТУРА И ФОРМАТ ДАННЫХ
Information
bit
Бит, вырабатываемый источником данных и предназначенный для передачи данных пользователя
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
46. Бит
Bit
Двоичная единица представления данных
Источник: ГОСТ 15971-90: Системы обработки информации. Термины и определения оригинал документа
Information
bit
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > BIT
См. также в других словарях:
ГОСТ 18676-73: Эксплуатация промыслового флота и портов. Термины и определения — Терминология ГОСТ 18676 73: Эксплуатация промыслового флота и портов. Термины и определения оригинал документа: 12. Автономная работа промыслового флота Автономная работа Е. Self contained operation of a fishing fleet Промысловая работа,… … Словарь-справочник терминов нормативно-технической документации
Сканер портов — У этого термина существуют и другие значения, см. Сканер. Сканер портов программное средство, разработанное для поиска хостов сети, в которых открыты нужные порты. Эти программы обычно используются системными администраторами для проверки… … Википедия
ГОСТ 23867-79: Эксплуатация речных портов. Термины и определения — Терминология ГОСТ 23867 79: Эксплуатация речных портов. Термины и определения оригинал документа: 5. Аванпорт Внешняя часть порта, расположенная за естественным или искусственным укрытием, приспособленная для якорной стоянки, загрузки и разгрузки … Словарь-справочник терминов нормативно-технической документации
Список портов TCP и UDP — Эта статья содержит незавершённый перевод с английского языка. Вы можете помочь проекту, переведя её до конца. В данной статье приведён список портов TCP и UDP, ко … Википедия
Сканирование портов — Сканирование портов первый шаг в процессе взлома или предупреждения взлома, так как он помогает определить потенциальные цели. Вокруг каждого хоста независимо от аппаратного и программного обеспечения или выполняемых функций имеется некоторое… … Википедия
Списочное количество судов — 5. Списочное количество судов Численный состав судов, находящихся набалансе на конец определенного периода, независимого от времени их поступления Источник: ГОСТ 18676 73: Эксплуатация промыслового флота и портов. Термины и определения … Словарь-справочник терминов нормативно-технической документации
Среднесписочное количество судов — 6. Среднесписочное количество судов Численный состав судов, находящихся на балансе с учетом времени их поступления, списания или передачи в аренду. Примечание. Величина, равная частному от деления суммы календарных судо суток за определенный… … Словарь-справочник терминов нормативно-технической документации
Список портов серии Doom — Данный список перечисляет неофициальные порты для классических игр серии Doom. Как правило, такие порты улучшают игровой движок, полностью или частично переделывая графику, добавляют совместимость с современными операционными системами, а также… … Википедия
Socket H2 — (LGA 1155) Дата выпуска: 2011 Тип разъёма: LGA … Википедия
Brocade Communications Systems — Brocade, Inc. Тип Публичная компания Листинг на бирже NASDAQ: BRCD Год основания … Википедия
ВАРИКОНТ МИКРО — многофункциональный программируемый контроллер (ПЛК). ВАРИКОНТ является зарегистрированным товарным знаком фирмы НовоСофт (РБ). Выход контроллера состоялся в 2006 году. Содержание 1 Назначение 2 Конструкция … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский